Трехпозиционные регуляторы
Назначение. Принцип работы
Трехпозиционные регуляторы обеспечивают хорошее качество регулирования для инерционных объектов с малым запаздыванием.
Трехпозиционные регуляторы используются для управления переключательными элементами -дискретными исполнительными устройствами:
- электромеханическими реле,
- контакторами,
- транзисторными ключами,
- симисторными или тиристорными устройствами,
- твердотельными реле и др.
Трехпозиционные регуляторы используются для систем управления уровнем различных веществ, для систем управления нагреванием-охлаждением различных тепловых процессов, холодильных установок, регулирования микроклимата подогревателем и вентилятором, для систем распределения и смешивания различных потоков веществ с помощью трехходовых клапанов, кранов, смесителей, реверсивных электродвигателей, сервоприводов и др.
Трехпозиционный регулятор включает при помощи переключательных элементов электродвигатель исполнительного механизма на правое вращение (например, открытие регулирующего органа), остановку или левое вращение (соответственно - закрытие регулирующего органа), три позиции (отсюда и название регулятора - трехпозиционный) - электродвигатель включен на правое вращение, полностью остановлен или включен на левое вращение.
Принцип работы трехпозиционного регулятора рассмотрим на емкости с водой, с постоянно работающим насосом подкачки - см. рис.1.
- Для измерения уровня в емкости установлен датчик уровня. На линии подкачки после насоса установлен регулирующий клапан с электроприводом. При заданном уровне SP - «норма» - клапан находится в некотором промежуточном положении.
- При уменьшении уровня ниже уставки SPL «нижний уровень» включится электродвигатель сигналом Б (больше), открывая клапан.
- При восстановлении уровня электродвигатель клапана остановится (снятием сигнала Б) - уровень будет находиться в зоне SP «норма».
- Если уровень повысится выше уставки SPh «верхний уровень», то клапан закроется, отключится электродвигатель сигналом М (меньше).
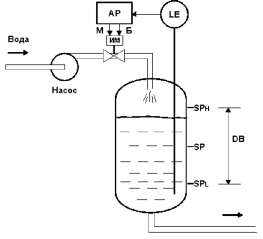
АР - трехпозиционный регулятор
ИМ - исполнительный механизм
LE - датчик уровня
SP - заданное значение
SPh - заданное значение верхнего уровня
SPl - заданное значение нижнего уровня
DB -зона нечувствительности регулятора
М - сигнал регулятора «меньше»
Б - сигнал регулятора «больше»
Регулятор работает по принципу SPl «нижний уровень» - SP «норма» (средний уровень) - SPh «верхний уровень».
Величина ширины зоны нечувствительности (мертвой зоны) DB (зона «норма») - является программируемым параметром настройки трехпозиционного регулятора (см. рис.1).
Увеличение ширины зоны нечувствительности DB уменьшается точность регулирования и может привести к тому, что в процессе работы САР регулирующий орган будет без остановки перемещаться от одного крайнего положения к другому, т.е., не будет отличаться от двухпозиционного регулятора. К такому же результату приводит значительное увеличение скорости регулирующего органа.
Диапазон нечувствительности (мертвая зона) DB устанавливается с центром в заданной точке.
Варианы представления зоны нечувствительности (DB):
- полное значение зоны нечувствительности (см. рис.1),
- половинное значение зоны нечувствительности (см. рис.3.3).
Структурная схема трехпозиционной системы регулирования приведена на рис. 2.
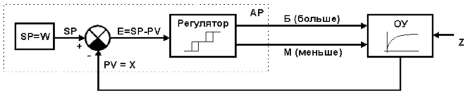
где: АР - трехпозиционный регулятор,
ОУ - обьект управления,
SP - узел формирования заданной точки (задания),
Е - рассогласование регулятора,
PV=X- регулируемая величина,
сигналы Б (больше) и М (меньше) - управляющие воздействия,
Z - возмущающее воздействие.
Для предотвращения «дребезга» управляющего выходного устройства (например, реле) и исполнительного механизма вблизи точки его включения (слишком частого включения), предусматривается гистерезис Н.
Алгоритмы трехпозиционного регулирования
Алгоритм трехпозиционных регуляторов определяется статической характеристикой: зависимостью выходных сигналов Ум (меньше) и Уб (больше) от входного Х (см. рис. 3).
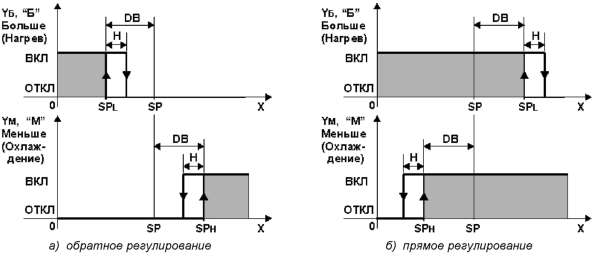
На рисунке 3-а представлена статическая характеристика трехпозиционной системы регулирования при обратном направлении регулирования. Зона регулирования без перекрытия.
На рисунке 3-б представлена статическая характеристика трехпозиционной системы регулирования при прямом направлении регулирования. Зона регулирования с перекрытием.
Выбор направления регулирования осуществляется в различных микропроцессорных регуляторах по разному (см. руководство по эксплуатации на соответствующую модель регулятора):
- с помощью параметра «прямое-обратное регулирование»,
- с помощью знака параметра «зона нечувствительности регулятора». При задании положительного значения параметра обеспечивается зона регулирования без перекрытия, при задании отрицательного значения - обеспечивается зона регулирования с перекрытием.
Алгоритм трехпозиционных регуляторов при обратном направлении регулирования (см. рис.3-а) выглядит следующим образом:
Выходная величина Уб равна максимальному воздействию - нагреватель включен:
- Уб = max при X<SP-DB, где DB-значение ширины зоны нечувствительности. Выходная величина Уб равна минимальному воздействию - нагреватель выключен:
- Уб = 0 при X>SP-DB+H, где Н-значение гистерезиса.
Выходная величина Ум равна максимальному воздействию - охладитель включен: - Ум = max при X>SP+DB, где DB-значение ширины зоны нечувствительности. Выходная величина Ум равна минимальному воздействию - охладитель выключен:
- Ум = 0 при X<SP+DB-H, где Н-значение гистерезиса.
Зона гистерезиса
Ширина зоны гистерезиса в современных трехпозиционных регуляторах является программируемым параметром настройки. Представление зоны гистерезиса описывается в руководстве по эксплуатации на соответствующий тип регулятора или систему регулирования.
Назначение гистерезиса Н - предотвращение «дребезга» управляющего выходного устройства (например, реле) и исполнительного механизма вблизи точки его включения (слишком частого включения). Также зона гистерезиса предназначена для исключения одновременного включения выходных устройств Уб (больше) и Ум (меньше), например для управления реверсивными двигателями, где одновременное включение может привести к выходу из строя двигатель исполнительного механизма.
В литературе по автоматизации также встречаются другие наименования параметра зоны гистерезиса - зона возврата, зона неравномерности, дифференциал.
Гистерезис (в некоторых типах регуляторов) может принимать как положительные, так и отрицательные значения. Отрицательные значения гистерезиса используются в основном для упреждения или задержки включения (выключения) выходных устройств.
Процессы регулирования с трехпозиционным законом
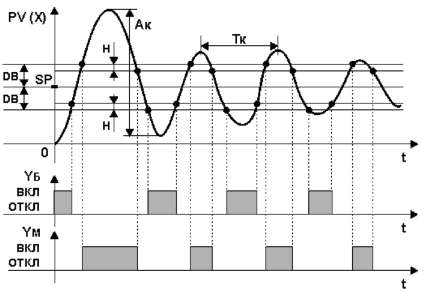
Процесс регулирования с трехпозиционным законом при обратном направлении регулирования представлен на рис4.
Процесс трехпозиционного регулирования является автоколебательным - регулируемая величина как в переходном, так и в установившемся режиме периодически изменяется относительно заданного значения (см. рис.4), т.е. регулируемая величина PV (X) подвержена незатухающим колебаниям.
Показателями автоколебательного режима являются амплитуда автоколебаний Ак и период автоколебаний Тк (см. рис.4).
Частота и амплитуда колебаний зависят и определяются следующими величинами:
- от времени транспортного запаздывания Td,
- от постоянной времени обьекта Т (определяется инерционностью объекта),
- от максимальной скорости R изменения параметра Х (определяется по переходной характеристике),
- от величины зоны нечувствительности DB регулятора и гистерезиса H переключательного элемента.
Для объектов с большой инерционностью (большим значением постоянной времени обьекта Т) и с малым запаздыванием Td регулирование происходит с постоянными колебаниями до 3-10% от задания SP.
- Чем больше гистерезис Н, отношение Td /Т, R - тем больше амплитуда колебаний Ак.
- Чем больше время запаздывания Td , постоянная времени обьекта Т и зона нечувствительности DB - тем больше период колебаний Тк (см. рис.4).
Точность регулирования технологического параметра, например, температуры зависит от величины гистерезиса. Чем меньше гистерезис, тем точнее регулирование, но тем чаще включается нагреватель и тем самым больше износ коммутационных элементов (например, реле). Уменьшая гистерезис можно повысить качество регулирования до некоторого предела, определяемого параметрами обьекта регулирования (тепловой инерцией, мощностью нагревателя, тепловой связью нагревателя и обьекта и др.).
Параметры настройки трехпозиционных регуляторов:
Описание параметров настройки приводятся в руководстве по эксплуатации на соответствующую модель регулятора.
- Зона нечувствительности DB. В различных типах регуляторов может быть представлена как:
- Полное значение (см. рис.1) или половинное значение зоны нечувствительности (см. рис.3).
- С помощью знака параметра «зона нечувствительности регулятора» можно установить направление действия регулятора. При задании положительного значения параметра обеспечивается зона регулирования без перекрытия, при задании отрицательного значения - обеспечивается зона регулирования с перекрытием.
- Ширина зоны гистерезиса.
- Может принимать как положительные, так и отрицательные значения.
- Возможно задание для различных управляющих выходов (нагревание, охлаждение) различных зон гистерезиса - гистерезис нагревания, гистерезис охлаждения. Это необходимо для того, чтобы учесть ассиметрию обьекта управления.
- Направление действия регулятора.
- Может устанавливаться обратное или прямое управление.
Возможность программирования различных параметров позволяет создать большое количество разнообразных трехпозиционных систем регулирования.
Трехпозиционное импульсное управление
Трехпозиционный импульсный регулятор применяется для управления интегральными исполнительными механизмами, реверсивными электродвигателями, насосами и другим оборудованием.
Параметрами настройки трехпозиционного импульсного регулятора являются:
- Направление действия регулятора. Прямое, обратное.
- Длительность управляющего импульса нагревания (больше, в, Ув) -
- Пауза между управляющими импульсами нагревания (больше, в, Ув) - trs.
- Длительность управляющего импульса охлаждения (меньше, М, Ум) - tM.
- Пауза между управляющими импульсами охлаждения (меньше, М, Ум) - W
- Зона нечувствительности DB (полное или половинное значение).
- Ширина зоны гистерезиса (положительные или отрицательные значения, для нагревания, охлаждения).
В качестве примера на рис.5 приведен процесс трехпозиционного импульсного регулирования (при обратном направлении регулирования).
Параметры настройки регулятора представлены на рисунке 5.
Структурная схема трехпозиционной импульсной системы регулирования приведена на рис. 2.
Алгоритм работы трехпозиционного импульсного регулятора аналогичный алгоритму представленному на рис. 3-а, за исключением формирования выходных импульсных сигналов. В трехпозиционном импульсном регуляторе выходные сигналы (больше-меньше) формируются импульсами программируемой длительности и паузы.
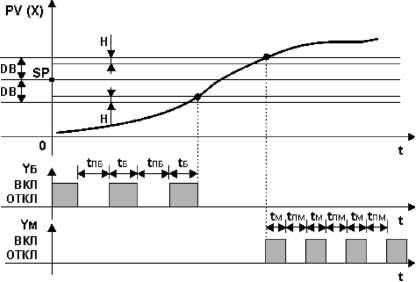
При программировании различных соотношений длительность-пауза изменяется скорость перемещения исполнительного механизма, что в свою очередь вызывает более точный выход на заданную точку, однако данный тип регулятора является более инерционным по сравнению с обычным трехпозиционным регулятором.
Величины длительностей tб, tм и пауз tпб, tпм, устанавливаются таким образом, чтобы был найден оптимальный компромисс между минимально допустимой длительностью включения исполнительного механизма или блока (например, реле, контактора, магнитного пускателя, охлаждающего устройства, компрессора), частотой включения и получаемого в результате этого характера регулируемой величины.
Tags: регулятор