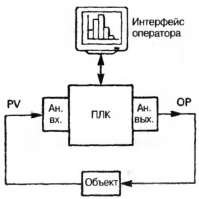
Замкнутая система управления с ПЛК
Общий вид замкнутой системы управления, построенной на основе ПЛК, приведен на рис. 4.32. Переменная объекта PV читается аналоговой входной платой, а выходной сигнал ОР формируется аналоговой выходной платой. Уставка SP задается оператором (с помощью графического терминала на рис. 4.32) или в виде некоторой программной последовательности. ПИД-алгоритм управления реализуется программными средствами. Такую программу можно написать, используя четыре математические операции (+, —, х, / ), но при этом нужно проявлять осторожность. Суть в том, что для подпрограмм интегрирования и дифференцирования должно быть известно время прогона основной программы, и, кроме того, необходимо предусмотреть средства защиты от насыщения исполнительного устройства, которое может наступить из-за накопления интегральной составляющей сигнала ОР.
Для большинства, если не для всех ПЛК, способных поддерживать аналоговые входные и выходные платы, производитель в библиотеку программ включает функцию PID, реализующую ПИД-ал-горитм управления. В данном разделе мы рассмотрим, как работает ПЛК GEM-80 в замкнутой системе управления.
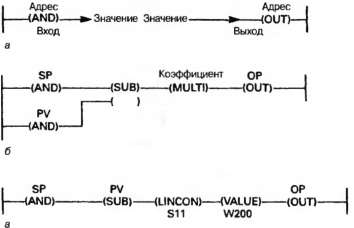
GEM-80 принимает значения сигналов извне с помощью адресных инструкций AND, а выводит их на внешние устройства с помощью инструкций OUT, как показано на рис. 4.33 (я) (как и в разд. Аналоговые входные платы и Аналоговые выходные сигналы, это лишь упрощенное представление того, что происходит в действительности). Адреса входов имеют вид Аи (например, А4), а адреса выходов — вид Ви (например, ВЗ). GEM-80 может также хранить числа в ячейках W (например, некоторое значение (value) может храниться по адресу W112).
Сначала мы рассмотрим простой регулятор пропорционального действия, где Е = SP — PV. Учитывая, что OP = К(SP — PV), мы можем выполнить все операции, использующие математические функции, работающие с целыми числами, как показано на рис. 4.33 (б). Однако здесь имеется тот недостаток, что выход будет изменяться большими скачками. Например, при К = 4 скачки на выходе будут величиной 4 единицы.
GEM-80 имеет много встроенных функций, работающих с вещественными числами. Одна из них — это линейная функция Y = АХ + В, имя которой LINCON-S11. Ее можно использовать только для умножения на целое число, положив В=0. Выражая функцию вычитания в более компактной форме и объединяя ее с функцией LINCON, мы получим одно звено многоступенчатой схемы, изображенное на рис. 4.33 (в). Аргументы А и В функции LINCON хранятся по адресам, определенным функцией VALUE.
Можно реализовать полный блок ПИД-регулятора с именем PID-ABS-S34, простейший вид которого изображен на рис. 4.34. Адреса хранения параметров К, Tj и указываются в блоке VALUE, следующем после блока PIDABS. Как показано на рисунке, эти адреса начинаются с ячейки W220. Всего функция PIDABS требует использования 15 ячеек памяти.
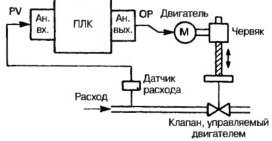
С функцией PIDABS тесно связана другая функция — PIDINC, которая используется, если регулятор управляет клапаном с электрическим приводом, как показано на рис. 4.35. В данном случае электродвигатель действует как интегратор, поэтому создаваемое им перемещение равняется интегралу OP по dt.
Если здесь используется обычный ПИД-регулятор, то замкнутая система управления будет неустойчивой. Функция PIDINC является производной от PIDABS, и ее действие определяется выражением
С учетом интегрирующих свойств электропривода это эквивалентно действию обычного ПИД-регулятора.
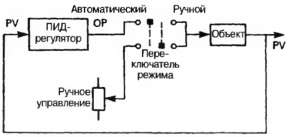
До сих пор мы предполагали, что система управления работает только в автоматическом режиме. Но часто требуется и ручной режим работы с возможностью переключения в автоматический режим, как показано на рис. 4.36. Здесь существует скрытая проблема.
Когда выбирается ручной режим управления и при этом ПИД-регулятор продолжает работать, тогда в этот момент значение РУне обязательно будет равно SP, поэтому за счет интегральной составляющей выходная переменная ПИД-регулятора будет либо нарастать до своего максимального значения, либо стремиться к нулю. Когда происходит возврат к автоматическому режиму, то PV будет некоторое время иметь широкий размах колебаний, пока ПИД-ре-гулятор не восстановит свои функции управления.
Все, что в данном случае необходимо, — это безударный переход, при котором в момент переключения из одного режима в другой выравниваются значения выходного сигнала регулятора. В GEM-80 это достигается с помощью трех звеньев многоступенчатой схемы, как показано на рис. 4.37. Требуемый режим работы, автоматический или ручной, выбирается переключателем, соединенным с дискретным входом А2.0, активизированным для автоматического режима. (Практическая рекомендация для проектировщика: при пропаже питания переключателя должен происходить переход в ручной режим с сохранением последнего значения выходного сигнала регулятора.)
Первое звено служит для выбора выхода от функции PIDABS (при автоматическом режиме) или от задатчика ручного управления. Функция RAMP ограничивает скорость изменения сигнала при ручном управлении.
Второе и третье звенья выполняют выравнивание сигналов. Ячейка W112 хранит значение выхода функции PIDABS (совместно
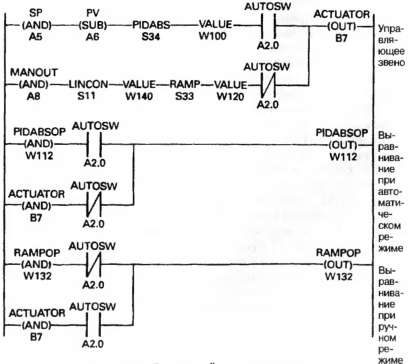
с блоком, начинающимся с адреса W100), a W132 — значение выхода функции RAMP (в блоке, начинающемся с адреса W120).
В автоматическом режиме звено 2 не действует, а звено 3 записывает значение выхода В7 назад в ячейку W132. При переключении из автоматического режима в ручной выход RAMP начнется с последнего значения, имевшего место в автоматическом режиме.
Точно так же в ручном режиме звено 2 записывает значение выхода В7 в ячейку W112, где хранится значение выхода функции PIDABS, так что при переходе из ручного режима в автоматический выход функции PIDABS начнется с последнего значения, имевшего место в ручном режиме. Звено 3 в ручном режиме не действует.
Таким образом, безударный переход осуществляется в обоих направлениях.