Фильтрация
Установочные данные на рис. 4.21 включают в себя и постоянную времени фильтра первого порядка для входного сигнала. Фильтр предназначен для устранения любого шума, который может быть наложен на сигнал. Если аналоговые данные, поступающие от другой системы, не отфильтрованы или необходимо иметь очень большую постоянную времени (плата 1771-IFE на рис. 4.20 может обеспечить постоянную времени не более 1 с), то программист имеет возможность создать отдельную программу фильтрации.
Фильтр первого порядка описывается простым дифференциальным уравнением
где х — входной сигнал (необработанная величина от входной платы), у — отфильтрованный сигнал и Т— постоянная времени.
В системе с ПЛК значения у и х не являются непрерывными, а представляют собой выборки, следующие с интервалами dT (это определяется временем обновления входов и выходов платы или частотой, с которой производятся выборки).
Таким образом, мы получаем входную последовательность хn, хn-1, xn-2, где xnсамый последний отсчет, а хn-1— предыдущий, и аналогичную выходную последовательность yn, уn-1и т. д.
Можно воспользоваться аппроксимацией
Подстановка этого выражения в (4.2) дает:
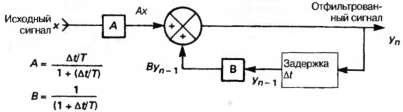
Отсюда получаем отфильтрованное значение уn:
Это требует всего одной ячейки памяти для хранения последнего значения у (обозначенного уn-1.) и легко может быть выполнено с помощью последовательных операций, представленных на рис. 4.23. Заметим, что для того, чтобы выражение (4.5) и соответствующие ему операции на рис. 4.23 давали правильный результат, время обновления данных dT должно быть известным и постоянным.