Сигналы и стандарты
Из предыдущих разделов ясно, что не подвергнутые обработке сигналы от датчиков весьма разнообразны и диапазон их изменения простирается от нескольких милливольт (для термопары) до более чем сотни вольт для тахогенератора. Кроме того, они могут быть вызваны изменениями напряжения постоянного тока, переменного тока или даже сопротивления. Поэтому совершенно очевидно, что если аналоговые входные платы работают лишь в определенном диапазоне сигналов, то необходимо использовать некоторую стандартизацию.
В результате происхождение входного сигнала можно представить так, как показано на рис. 4.13. Первичный сигнал от датчика на месте преобразуется электронным устройством в определенный стандартный сигнал, а совокупность датчика и этого устройства называется передатчиком или преобразователем. После этого стандартизированный сигнал, несущий информацию об измеряемой переменной объекта управления, может быть подан на обычную аналоговую входную плату.

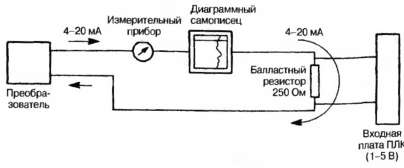
Возникает естественный вопрос: каким должен быть этот стандартизированный сигнал? Аналоговые сигналы — это сигналы низкого уровня и поэтому подвержены электрическим помехам (или шумам, как их чаще всего называют). Сигнал, представленный электрическим током, менее подвержен влиянию шумов, чем сигнал, представленный напряжением, поэтому обычно выбирается токовый контур. Преобразователь и принимающее устройство соединяются по схеме, изображенной на рис. 4.14, причем токовый сигнал на приемной стороне преобразуется в напряжение при помощи балластного резистора. Токовый контур можно использовать с несколькими приемными устройствами (это могут быть, например, измерительный прибор, диаграммный самописец или вход ПЛК), соединенными последовательно.
Самый распространенный стандарт представляет аналоговый сигнал в виде тока с диапазоном изменения 4—20 мА, где 4мА соответствует минимальному уровню сигнала, а 20 мА — максимальному. Если, например, преобразователь давления дает сигнал 4—20 мА, представляющий давление в диапазоне 0—10 бар, то давлению 8 бар будет соответствовать величина тока 8 х (20 — 4)/10 + 4 = 16.8 мА. Сигнал 4—20 мА часто с помощью балластного резистора величиной 250 Ом преобразуется в сигнал 1 —5 В.
«Нулевой» сигнал 4 мА (называемый смещением) предназначен для двух целей. Во-первых, он используется как защита от повреждений преобразователя или кабельного шнура. Если происходит отказ преобразователя или обрыв шнура или же в линии связи возникает короткое замыкание, то ток через балластный резистор будет равен нулю, что соответствует «отрицательному» сигналу 0 В на приемной стороне. Это может быть очень легко обнаружено и использовано как аварийный сигнал «неисправность преобразователя».
Ток смещения 4 мА также упрощает компоновку системы. На рис. 4.14 предполагалось, что преобразователь имел местный ис-
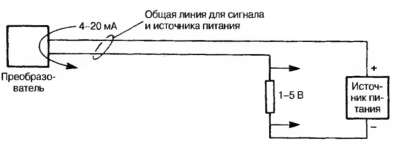
точник питания и обеспечивал токовый сигнал. Подобная компоновка возможна, но более распространенной (и более простой) является схема, изображенная на рис. 4.15. Здесь источник питания (обычно 24—30 В постоянного тока) помещается на стороне приемного устройства, а сигнальные линии служат как для питания преобразователя, так и для передачи тока. Преобразователь отбирает от источника питания ток в диапазоне 4—20 мА в соответствии с измеряемым сигналом. Этот ток, как и раньше, преобразуется в напряжение с помощью балластного резистора.
Смещение в 4 мА обеспечивает ток, необходимый преобразователю для его нормальной работы. Очевидно, этого нельзя добиться, если диапазон сигнала будет составлять 0—20 мА. Преобразователи, включаемые по схеме рис. 4.15, обычно называются двухпроводными.