Функции основных блоков SCADA - системы
- Графической среды разработки и запускаприложений,
- Архивов,
- Аварий,
- Доступа
- Встроенных языков программирования
Графическаясреда разработки и запуска приложении (GraphWorX32)
Объединяетсредства разработки и просмотра графических мнемосхем автоматизированныхрабочих мест оператора АСУ ТП.
Являетсяинструментальным средством, предназначенным для визуализации контролируемыхтехнологических параметров и оперативного диспетчерского управления на верхнемуровне АСУ ТП.Мнемосхемы(экранные формы) могут создаваться как на основе встроенных средств рисования,так и управляющих элементов ActiveX различных производителей.
Основные характеристикиGraphWorX32
- Мощные инструменты для создания экранных форм идинамических элементов отображения
- Возможность встраивания элементов управленияActiveX и объектов OLE
- Встроенная среда редактирования сценарныхпроцедур Microsoft Visual Basic. Алгоритмы вторичной обработки данных ипроцедуры управления экранными формами могут разрабатываться в данной среде
- Динамизация элементов отображения с малымвременем обновления (<50 мс)
- Поддержка шаблонов экранных форм, содержащихнаиболее часто используемые слои графических объектов
- Возможность встраивания в HTML-страницы и другиеконтейнеры OLE (MS Word, MS Excel, MS Access и др.)
- Возможность просмотра браузерами Интернет,такими как MS Internet Explorer
- Обширная библиотека элементов отображения,ориентированных на построение мнемосхем промышленных объектов
- Поддержка графических слоев: один файл можетсодержать множество экранных форм
- Поддержка градиентов цветовой палитры,обеспечивающая возможность реализации объемной графики
- Возможность динамической смены источников данныхво время исполнения посредством технологии псевдонимов
- Защита экранных форм паролем от внесениянесанкционированных изменений
- Возможность встраивания графиков, журналовсобытий и тревог.
- Средства импорта графических метафайлов (WMF) ирастровых изображений (BMP)
- Встроенный редактор выражений для выполненияматематических, функциональных, логических и других операций над данными.
Единые принципы организации экранных форм предоставляютследующие преимущества:
- наглядность изображения;
- высокую информативность;
- низкую утомляемость.
Структура типовой экранной формы АРМ:
- общий светло-серый фон (~25%);
- в верхней части экрана отображается панельуправления, на ней расположены чаще всего используемые кнопки, общие для всехмнемосхем(«Смена пользователя», «Общаясводка тревог» и «Тренды»);
- ниже панели управления располагается панельпереходов с пиктограммами выбора экранов и стрелками переходов между формами;
- в нижней части экрана отображается окнотревожных и аварийных событий;
- в правой части экрана под панелью переходовотображаются индикаторы наиболее важных аварийных параметров и режимов;
- в левой верхней части экрана, на панелиуправления, приводится изображение логотипа;
- в правой верхней части экрана, на панелиуправления, дата и время;
- вверху по центру, на панели переходов,наименование объекта автоматизации;
- в центре текущая мнемосхема объектаавтоматизации.
Отображениеобъектов и параметров на мнемосхемах
Объектами отображения называются единицытехнологического оборудования и автоматики, которые имеют отдельное изображениена мнемосхеме. Для всех объектов зарезервированными состояниями считаются:
- авария – красный цвет;
- ремонт, блокировка – синий цвет;
- недостоверность, неопределенность – тёмно-серый.
Для аналоговых измерений зарезервированнымисостояниями считаются:
- выход за предельное значение – жёлтый цвет;
- выход за аварийное значение – красный цвет;
- ремонт, блокировка – синий цвет;
- недостоверность, неопределенность – тёмно-серый.
В состоянии недостоверности вместо текущегозначения отображается символы “ХХХ”.
Отображениепараметров контроля технологического процесса
На мнемосхемах требуется отображать параметры контролятехнологического процесса. Для этого была используют типовую ячейку (рисунок5.8) отображения параметров, котораяпомогает оператору своевременно реагировать на сгенерированную тревогу,так как показывается место возникшей тревоги. К тому же типовая ячейка занимаетминимум места на мнемосхемах, что немаловажно, так как технологический процессимеет сложную структуру, содержащий большое количество исполнительныхмеханизмов.
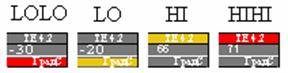
Типовая ячейка представлена в виде прямоугольника спривязкой к месту установки. Прямоугольник делится горизонтальными линиями натри равных части по вертикали. В верхней части указывается позиция датчика попроекту, в средней - значение отображаемого параметра, в нижней – единицаизмерения.
Для сигнализации предельных порогов параметраразработан следующий метод:если порогверхний, то закрашивается верхняя часть, если нижний – нижняя часть. Принормальном состоянии все части имеют темно–серый цвет. При выходе значения запорог, область обозначения порога для данного параметра окрашивается в соответствующийцвет (рисунок 5.9).
Типы порогов сигнализации:
- LoLo – значение меньше “Ниже нижнего порога”, красный цвет
- Lo – значениеменьше “Нижнего порога”, желтый цвет
- Hi – значениебольше “Верхнего порога”, желтый цвет
- HiHi – значениебольше “Выше верхнего порога”, красный цвет.
Чтобы сократить время на анимацию типовых ячеек, быласконфигурирована глобальная таблица порогов,доступная всей системе. В глобальной таблице были определены цвета дляпорогов сигнализации. Такая таблица дает централизованное средство управленияпреобразованием системных данных. Если в дальнейшем появится необходимостьизменить цвет или порог, то достаточно будет сделать изменения только в одномместе, в таблице порогов.
Пример окнаконтроля и управления задвижкой
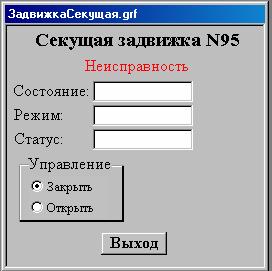
В данном окне информацияпредставлена по степени важности:
- Сигнализацияаварии
- Состояние: “Вработе”/ “В ремонте”
- Режим:“Местный”/”Дистанционный”
- Статус: “Открыта”/ “Закрыта”
- Панель управления
Сигнализация аварии – надпись ”Неисправность”– выводится в верхней части окна, так как важно вовремя оповестить оператора овозникшей аварии.Поля ”Состояние” и ”Режим”расположены выше других объектов, так как от значения этих полей зависятвозможности оператора по управлению секущей задвижки:
- если задвижканаходится в состоянии ”В ремонте”, то возможен только местный режим управленияи панель ”Управление” недоступна;
- если задвижканаходится всостоянии ”В работе” и врежиме ”Дистанционный”, то оператор может управлять задвижкой с помощью панели”Управление.
Режим “Mестный”/“Дистанционный” выбирается аппаратно, переключением тумблера в шкафуавтоматики.
Подсистемаархивов (TrendWorX32)
Графическоепредставление значений технологических параметров во времени способствуетлучшему пониманию динамики технологического процесса предприятия. Поэтомуподсистема создания трендов и хранения информации о параметрах с целью еедальнейшего анализа и использования для управления является неотъемлемой частьюлюбой SCADA - системы.
Тренды реального времени (RealTime) отображают динамические изменения параметра в текущем времени. Припоявлении нового значения параметра в окне тренда происходит прокрутка графикасправа налево. Таким образом текущее значение параметра выводится всегда вправой части окна.
Тренды становятсяисторическими (Historical) после того, как данные будут записаны на диск иможно будет использовать режим прокрутки предыдущих значений назад с цельюпосмотреть прошлые значения. Отображаемые данные тренда в таком режиме будутнеподвижны и будут отображаться только за определенный период
Подсистематрендов представляет открытое решение по высокопроизводительному построениюграфических зависимостей контролируемых параметров. Поддерживает спецификациюOPC доступа к историческим данным (OPC HDA), устанавливающую требования кподсистеме накопления и регистрации значений контролируемых параметров вразличных базах данных с возможностью последующего извлечения и представленияна графиках.
Подсистема архивов обеспечиваетнакопление и представление текущих данных в виде графических зависимостей отвремени, а также является мощным средством архивирования накапливаемойинформации в базах данных с возможностью последующего извлечения и просмотра награфиках.
Основные функциональные возможностиподсистемы архивов:
- Представление значений контролируемыхпараметров, получаемых от серверов OPC, на графиках различных типов в реальноммасштабе времени.
- Поддерживаются следующие виды графиков:
- зависимость от времени;
- логарифмическая зависимость от времени;
- гистограмма;
- круговая диаграмма;
- зависимость одного параметра от другого. - Возможность настройки параметров графика,добавления и удаления перьев во время исполнения
- Возможность построения графических зависимостейна основе данных пользователя путем использования сценариев VBA или внешнихприложений
- Архивирование значений контролируемых параметровв базах данных MS Access, MS SQL Server, Oracle при помощи сервера доступа кисторическим данным TrendWorX32 SQL Server
- Вычисление статистических характеристик выборокзначений контролируемых параметров
- Извлечение значений контролируемых параметров изархивов и представление в виде графиков различных типов
- Возможность одновременного просмотра текущих иисторических данных в одной области построения
- Вывод графиков на печатающее устройство
- Разработка и исполнение сценарных процедур навстроенном Visual Basic for applications
- Возможность вставки элементов просмотра графиковв различные контейнеры ActiveX
- Встроенное средство генерации отчетов в базахданных и MS Excel
Подсистемааварий (AlarmWorX32)
Это подсистема обнаружения, идентификации,фильтрации и сортировки аварийных и других событий, связанных с контролируемымтехнологическим процессом и состоянием технических средств АСУ ТП.Являетсянабором программных компонентов, предназначенных для обнаружения аварийныхсобытий, оповещения оперативного персонала, приема подтверждений восприятияинформации об аварийных событиях и регистрации информации об авариях в базеданных.
Основныефункциональные возможности подсистемы аварий:
- Обнаружение аварийных событий по множествупризнаков и критериев, настраиваемых пользователем
- Передача информации об обнаруженных аварияхклиентским приложениям, расположенным на разных узлах локальной или глобальнойсети
- Простое оповещение персонала об обнаруженныхаварийных событиях путем прерывистого отображения информации об аварии извукового сигнала
- Голосовое оповещение персонала об обнаруженныхаварийных ситуациях
- Оповещение персонала путем автоматическогодозвона по коммутируемым каналам связи с передачей сообщений об аварийныхсобытиях и приемом подтверждений восприятия от ответственных лиц
- Персональное планирование оповещения дляпривлечения к мероприятиям по устранению аварийной ситуации только дежурногоперсонала
- Анализ аварийных событий и действийответственного персонала
- Объединение всех аварийных событий иподтверждений восприятия системных сообщений ответственным персоналом в сводкиаварийных событий
- Отображение вспомогательной информации дляаварийных событий, позволяющей локализовать и устранить причины аварии
- Связь с аппаратными средствами системы черезинтерфейсы OPC
- Возможность запуска сервера обнаружения аварий вкачестве службы Windows NT
- Возможность записи информации о событиях вжурнал Windows NT
- Мощное средство конфигурирования признаковаварийных событий
- Управляющий элемент ActiveX просмотра текущихаварийных событий
- Управляющий элемент ActiveX просмотра архивасобытий
- Встроенная среда редактирования сценарныхпроцедур Microsoft Visual Basic for Applications 5.0
Состояние тревоги, в дальнейшемаларм (Alarm) - это некоторое сообщение, предупреждающее оператора овозникновении определенной ситуации, которая может привести к серьезнымпоследствиям, и потому требующее его внимания, а часто и вмешательства.А принял - ли оператор сообщение об аларме? Чтобы снять эти сомнения, всистемах управления принято различать неподтвержденные и подтвержденные алармы.Аларм называется подтвержденным после того, как оператор отреагировал насообщение об аларме. До этого аларм оставался в состоянии неподтвержденного.Наряду с алармами в SCADA - системах существует понятие событий. Событияпредставляют собой обычные статусные сообщения системы и не требуют реакцииоператора. Обычно событие генерируется при возникновении в системе определенныхусловий (типа регистрации оператора в системе).
От эффективности подсистемы алармов зависит скорость идентификациинеисправности, возникшей в системе, или технологического параметра, вышедшегоза установленные регламентом границы. Быстродействие и надежность этойподсистем