П-, ПИ-, ПД-, ПИД - регуляторы
В данном разделе приведены описания алгоритмов работы и законы регулирования непрерывных П-, ПИ-, ПД-, ПИД-регуляторов с различными структурами выходного сигнала - аналоговым выходом, дискретным (импульсным) выходом или ШИМ-выходом (широтно импульсным модулированным сигналом).
Классификация систем автоматического регулирования (САР) приведена в таблице 1 в "Классификация систем автоматического регулирования".
Типовые регуляторы и регулировочные характеристики
Для регулирования объектами управления, как правило, используют типовые регуляторы, названия которых соответствуют названиям типовых звеньев (описание типовых звеньев представлено в разделе 2.4):
- П-регулятор, пропорциональный регулятор
Передаточная функция П-регулятора: Wп(s) = K1. Принцип действия заключается в том, что регулятор вырабатывает управляющее воздействие на объект пропорционально величине ошибки (чем больше ошибка Е, тем больше управляющее воздействие Y). - И-регулятор, интегрирующий регулятор
Передаточная функция И-регулятора: Wи(s) = К0/s. Управляющее воздействие пропорционально интегралу от ошибки. - Д-регулятор, дифференцирующий регулятор
ПередаточнаяфункцияД-регулятора: Wд(s) = К2*s. Д-регуляторгенерирует управляющее воздействие только при изменении регулируемой веричины: Y= K2 * dE/dt.
На практике данные простейшие П, И, Д регуляторы комбинируются в регуляторы вида ПИ, ПД, ПИД (см. рис.1):
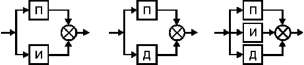
В зависимости от выбранного вида регулятор может иметь пропорциональную характеристику (П), пропорционально-интегральную характеристику (ПИ), пропорционально-дифференциальную характеристику (ПД) или пропорционально-интегральную (изодромную) характеристику с воздействием по производной (ПИД-регулятор).
- ПИ-регулятор, пропорционально-интегральный регулятор (см. рис.3.18.а)
ПИ-регулятор представляет собой сочетание П- и И-регуляторов. Передаточная функция ПИ-регулятора: Wпи(s) = K1 + K0/s. - ПД-регулятор, пропорционально-дифференциальный регулятор (см. рис.3.18.б)
ПД-регулятор представляет собой сочетание П- и Д-регуляторов. Передаточная функция ПД-регулятора: Wпд(s) = K1 + K2 s. - ПИД-регулятор, пропорционально-интегрально-дифференциальный регулятор (см. рис.3.18.в)
ПИД-регулятор представляет собой сочетание П-, И- и Д-регуляторов. Передаточная функция ПИД-регулятора: Wпид(s) = K1 + K0 / s + K2 s.
Наиболее часто используется ПИД-регулятор, поскольку он сочетает в себе достоинства всех трех типовых регуляторов.
Структурные схемы непрерывных регуляторов
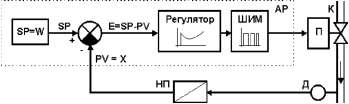
В данном разделе приведены структурные схемы непрерывных регуляторов с аналоговым выходом -рис.2, с импульсным выходом - рис.3 и с ШИМ (широтно импульсным модулированным) выходом -рис.4.
В процессе работы система автоматического регулирования АР (регулятор) сравнивает текущее значение измеряемого параметра Х, полученного от датчика Д, с заданным значением (заданием SP) и устраняет рассогласование регулирования E (B=SP-PV). Внешние возмущающие воздействия Z также устраняются регулятором. Работа приведенных структурных схем отличается методом формирования выходного управляющего сигнала регулятора.
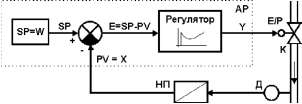
Непрерывный регулятор с аналоговым выходом
Структурная схема непрерывного регулятора с аналоговым выходом приведена на рис.2.
Выход Y регулятора АР (например, сигнал 0-20мА, 4-20мА, 0-5мА или 0-10В) воздействует через электропневматический преобразователь Е/Р сигналов (например, с выходным сигналом 20-100кПа) или электропневматический позиционный регулятор на исполнительный элемент К (регулирующий орган).
где:
АР - непрерывный ПИД-регулятор с аналоговым выходом,
SP - узел формирования заданной точки,
PV=X- регулируемый технологический параметр,
Е - рассогласование регулятора,
Д - датчик,
НП - нормирующий преобразователь (в современных регуляторах является входным устройством)
Y - выходной аналоговый управляющий сигнал Е/Р - электропневматический преобразователь,
К - клапан регулирующий (регулирующий орган).
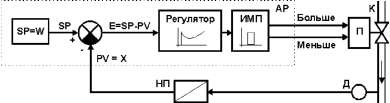
Непрерывный регулятор с импульсным выходом
Структурная схема непрерывного регулятора с импульсным выходом приведена на рис.3.
Выходные управляющие сигналы регулятора - сигналы Больше и Меньше (транзистор, реле, симистор) через контактные или бесконтактные управляющие устройства (П) воздействуют на исполнительный элемент К (регулирующий орган).
где:
АР - непрерывный ПИД-регулятор с импульсным выходом,
SP - узел формирования заданной точки,
PV=X- регулируемый технологический параметр,
Е - рассогласование регулятора,
Д - датчик,
НП - нормирующий преобразователь (в современных регуляторах является входным устройством) ИМП - импульсный ШИМ модулятор, преобразующий выходной сигнал Y в последовательность импульсов со скважностью, пропорциональной выходному сигналу: Q=\Y\/100. Сигналы Больше и Меньше - управляющие воздействия,
П - пускатель контактный или бесконтактный,
К - клапан регулирующий (регулирующий орган).
Непрерывный регулятор с ШИМ (широтно импульсным модулированным) выходом
Структурная схема непрерывного регулятора с ШИМ (широтно импульсным модулированным) выходом приведена на рис.4.
Выходной управляющий сигнал регулятора (транзистор, реле, симистор) через контактные или бесконтактные управляющие устройства (П) воздействуют на исполнительный элемент К (регулирующий орган).
Непрерывные регуляторы с ШИМ выходом широко применяются в системах регулирования температуры, где выходной управляющий симисторный элемент (или твердотельное реле, пускатель) воздействуют на термоэлектрический нагреватель ТЭН, или вентилятор.
АР - непрерывный ПИД-регулятор с импульсным ШИМ выходом,
SP - узел формирования заданной точки,
PV=X- регулируемый технологический параметр,
Е - рассогласование регулятора,
Д - датчик,
НП - нормирующий преобразователь (в современных регуляторах является входным устройством) ШИМ - импульсный ШИМ модулятор, преобразующий выходной сигнал Y в последовательность импульсов со скважностью, пропорциональной выходному сигналу: Q=\Y\/100.
П - пускатель контактный или бесконтактный,
К - клапан регулирующий (регулирующий орган).
Согласование выходных устройств непрерывных регуляторов
Выходной сигнал регулятора должен быть согласован с исполнительным механизмом и исполнительным устройством.
В соответствии с видом привода и исполнительным механизмом необходимо использовать выходное устройство непрерывного регулятора соответствующего типа, см. таблицу 1.
Таблица 1 - Согласование выходных устройств непрерывных регуляторов
| Выходное устройство непрерывного регулятора | Тип выходного устройства | Закон регулирования | Исполнительный механизм или устройство | Вид привода | Регулирующий орган |
|---|---|---|---|---|---|
| Аналоговый выход | ЦАП с выходом 0-5мА, 0-20мА, 4-20мА, 0-10В | П-, ПИ-,ПД-, ПИД-закон | Преобразователи и позиционные регуляторы электро-пневматические и гидравлические | Пневматические исполнительные приводы (с сжатым воздухом в качестве вспомогательной энергии) и электропневматические преобразователи сигналов или электропневматические позиционные регуляторы, электрические (частотные привода) | |
| Импульсный выход | Транзистор, реле, симистор | П-, ПИ-, ПД-, ПИД-закон | Контактные (реле) и бесконтактные (симисторные) пускатели | Электрические приводы (с редуктором), в т. ч. реверсивные | |
| ШИМ выход | Транзистор, реле, симистор | П-, ПИ-, ПД-, ПИД-закон | Контактные (реле) и бесконтактные (симисторные) пускатели | Термоэлектрический нагреватель(ТЭН) и др. |
Реакция регулятора на единичное ступенчатое воздействие
Одной из динамических характеристик обьекта управления является его переходная характеристика -реакция обьекта на единичное ступенчатое воздействие (см. Динамические характеристики), например, изменение заданной точки регулятора.
В данном разделе приведены переходные процессы системы управления при единичном ступенчатом изменении заданной точки при использовании регуляторов с различным законом регулирования.
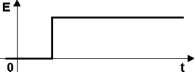
Если на вход регулятора подается скачкообразная функция изменения заданной точки - см. рис. 5, то на выходе регулятора возникает реакция на единичное ступенчатое воздействие в соответствии с характеристикой регулятора в функции времени.
П-регулятор, реакция на единичное ступенчатое воздействие
Параметрами П-регулятора являются коэффициент усиления Кр и рабочая точка Y0. Рабочая точка Y0 определяется как значение выходного сигнала, при котором рассогласование регулируемой величины равно нулю. При влиянии возмущающих воздействий возникает, в зависимости от Y0, отклонение регулирования.
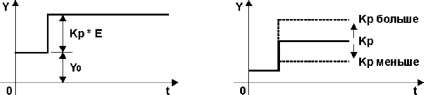
Рисунок 6 - П-регулятор. Реакция на единичное ступенчатое воздействие
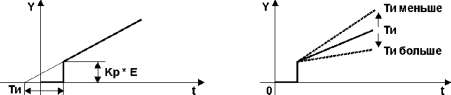
ПИ-регулятор, реакция на единичное ступенчатое воздействие
В отличие от П-регулятора у ПИ-регулятора, благодаря интегральной составляющей, исключается отклонение регулирования.
Параметром интегральной составляющей является время интегрирования Ти.
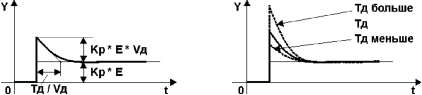
ПД-регулятор, реакция на единичное ступенчатое воздействие
У ПД-регуляторов пропорциональная составляющая накладывается на затухающую дифференциальную составляющую.
Д-составляющая определяется через усиление упреждения Уд и время дифференцирования Тд.
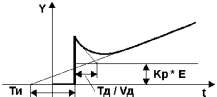
ПИД-регулятор, реакция на единичное ступенчатое воздействие
Б лагодаря дополнительному подключению Д-составляющей ПИД-регулятор достигает улучшения динамического качества регулирования.
См. ПИ-регулятор, ПД-регулятор.