Многопозиционные регуляторы
Многопозиционные регуляторы применяют:
- для повышения точности регулирования,
- для увеличения реакции системы регулирования и уменьшения времени регулирования,
- для улучшения показателей качества регулирования.
Назначение. Принцип работы
Многопозиционные регуляторы обеспечивают хорошее качество регулирования для инерционных объектов с малым запаздыванием. Данный тип регуляторов используется для управления переключательными элементами -дискретными исполнительными устройствами: электромеханическими реле, контакторами, транзисторными ключами, симисторными или тиристорными устройствами, твердотельными реле и др., а также трехходовыми клапанами, кранами, смесителями, реверсивными электродвигателями, сервоприводами.
Многопозиционные регуляторы могут управлять одновременно несколькими нагрузками, например, группа ТЭНов, вентиляторы, заслонки и пр.
Многопозиционный регулятор работает как многопозиционный переключатель.
Например, температура в камере регулируется двумя ТЭНами - одним большой мощности для быстрого выхода на температурный режим камеры, другим - менее мощным - для поддержания температуры в камере, а для понижения температуры (охлаждения) используется вентилятор.
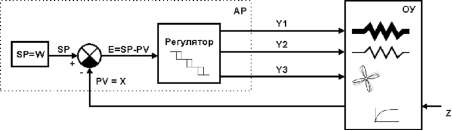
Пример структурной схемы многопозиционной системы регулирования приведен на рис. 1.
где:
АР - многопозиционный регулятор,
ОУ - обьект управления,
SP - узел формирования заданной точки (задания),
Е - рассогласование регулятора,
PV=X- регулируемая величина,
сигналы Y1 (управление ТЭНом большой мощности),Y2 (управление ТЭНом малой мощности), Y3 (управление вентилятором) - управляющие воздействия,
Z - возмущающее воздействие.
Алгоритм многопозиционного регулирования
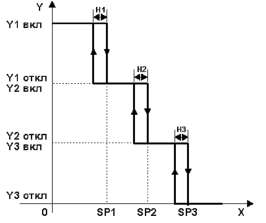
Алгоритм многопозиционных регуляторов определяется статической характеристикой: зависимостью выходных сигналов Yi от входного Х. На рисунке 2 представлена, в качестве примера, статическая характеристика многопозиционной системы регулирования.
Логика работы многопозиционного регулятора может быть представлена:
- графически, в виде статической характеристики (например, см. рис. 3.16),
- в виде таблицы состояний (см. таблицу 3.1 для примера на рис.3.16).
Таблица 1 - Логика работы многопозиционного регулятора
| Область регулируемого параметра Х (PV) | Выход Y1 | Выход Y2 | Выход Y3 | Примечание |
|---|---|---|---|---|
| X>SP1 | Отключен | Включен | Включен | |
| X<SP1-H1 | Включен | Включен | Включен | |
| X>SP2 | Отключен | Отключен | Включен | |
| X<SP2-H2 | Отключен | Включен | Включен | |
| X>SP3 | Отключен | Отключен | Отключен | |
| X<SP3-H3 | Отключен | Отключен | Включен |
Таблица состояний состоит из нескольких столбцов: Х (PV) - области регулируемого параметра Х, столбцов Y1-Y3 - старого и нового состояния выходных сигналов САР.
В таблице состояний, в качестве примера, указана логика работы двухпозиционного регулятора при обратном типе направления регулирования. В качестве логики работы выходных устройств может быть использована различная логика работы двухпозиционных и/или трехпозиционных законов регулирования, а также различные направления регулирования.
Наибольший эффект использования таблицы состояний достигается при проектировании и программировании очень сложных алгоритмов регулирования.
Зона гистерезиса
Ширина зоны гистерезиса в многопозиционных регуляторах является программируемым параметром настройки. Представление зоны гистерезиса описывается в руководстве по эксплуатации на соответствующий тип регулятора или систему регулирования.
Процессы регулирования с многопозиционным законом
Процесс регулирования (идеализированный) с многопозиционным законом представлен на рис.3.
Процесс многопозиционного регулирования, как и всех позиционных (релейных) законов регулирования, является автоколебательным - регулируемая величина PV как в переходном, так и в установившемся режиме периодически изменяется относительно заданного значения SP (см. рис. 3), т.е. регулируемая величина PV (X) подвержена незатухающим колебаниям.
Показателями автоколебательного режима являются амплитуда автоколебаний Ак и период автоколебаний Тк.

По сравнению с двухпозиционными регуляторами многопозиционные регуляторы имеют большую точность регулирования, большую реакцию системы регулирования, меньшее время регулирования, а также улучшенные показатели качества регулирования.
Параметры настройки многопозиционных регуляторов
- Уставка срабатывания выходного устройства одной или нескольких зон регулирования.
- Ширина зоны гистерезиса.
- Логика работы регулятора в каждой зоне в отдельности.
Используя возможность программирования различных параметров позволяет создать большое количество разнообразных многопозиционных систем регулирования.
Tags: регулятор гистерезис